|
I am a 5th-year Ph.D. student in the Paul G. Allen School at the University of Washington, where I am advised by Byron Boots. Additionally, I am a visiting researcher at Meta, working with Mustafa Mukadam as part of the AIM mentorship program. I received my M.S. in Electronics Engineering from Universidad de los Andes, Bogota, Colombia. There, I worked on multiagent reinforcement learning for traffic light signal control. I am honored to be a Fulbright scholar from Colombia 🇨🇴 Contact:
|

|
|
My research focuses on developing models that enable robot manipulators to interpret their environment through vision-based tactile perception. Specifically, I've been exploring how tracking extrinsic contacts between objects and their environment can be advantageous for policy learning. However, to truly leverage touch in robotics, we need a common backbone. Currently, I'm working on learning tactile representations using self-supervised learning that can be versatile for both static and dynamic contact interactions via vision-based tactile sensing |
|
|
|
|
Carolina Higuera*, Akash Sharma*, Taosha Fan*, Chaithanya Krishna Bodduluri, Byron Boots, Michael Kaes, Mike Lambeta, Tingfan Wu, Zixi Liu, Francois Robert Hogan+, Mustafa Mukadam+ Oral presentation at CoRL 2025 [code]Sparsh-X, the first multisensory touch representations across four tactile modalities: image, audio, motion, and pressure. Trained on ~1M contact-rich interactions collected with the Digit 360 sensor, Sparsh-X captures complementary touch signals at diverse temporal and spatial scales. By leveraging self-supervised learning, Sparsh-X fuses these modalities into a unified representation that captures physical properties useful for robot manipulation tasks. |
|
Akash Sharma, Carolina Higuera, Chaithanya Krishna Bodduluri, Zixi Liu, Taosha Fan, Tess Hellebrekers, Mike Lambeta, Byron Boots, Michael Kaes, Tingfan Wu, Francois Robert Hogan, Mustafa Mukadam CoRL, 2025 [code] Sparsh-skin provides embeddings for tactile data from magnetic skins covering dexterous hands. |
|
Carolina Higuera*, Akash Sharma*, Chaithanya Krishna Bodduluri, Taosha Fan, Patrick Lancaster, Mrinal Kalakrishnan, Michael Kaes, Byron Boots, Mike Lambeta, Tingfan Wu, Mustafa Mukadam CoRL, 2024 [code] Sparsh is a family of general touch representations trained via self-supervision algorithms such as MAE, DINO and JEPA. Sparsh is able to generate useful representations for DIGIT, Gelsight'17 and Gelsight Mini. It outperforms end-to-end models in the downstream tasks proposed in TacBench by a large margin, and can enable data efficient training for new downstream tasks. |

|
Carolina Higuera*, Joseph Ortiz, Haozhi Qi Luis Pineda Byron Boots, Mustafa Mukadam arXiv:2309.16652, 2023 [code] Improve NCF to enable sim-to-real transfoer and use it to train policies for insertion tasks. We demonstrate the utility of extrinsisc contacts during policy learning and perform experiments on a real tasks. |
|
Carolina Higuera*, Byron Boots, Mustafa Mukadam arXiv:2304.01182, 2023 [code] Best Paper Award, ICRA 2023 Workshop on Effective Representations, Abstractions, and Priors for Robot Learning, (RAP4Robots) We propose Tactile Diffusion to bridge the sim-to-real gap when using vision-based tactile sensors, like DIGIT. We demonstrate the utility of Tactile Diffusion on zero-shot clasification of Braille characters. |
|
Carolina Higuera*, Siyuan Dong, Byron Boots, Mustafa Mukadam 2023 International Conference on Robotics and Automation (ICRA) [code] Neural Contact Fields are an implicit representation for tracking extrinsic contact on an object surface (between object and environment) with vision-based tactile sensing (between robot hand and object). |
|
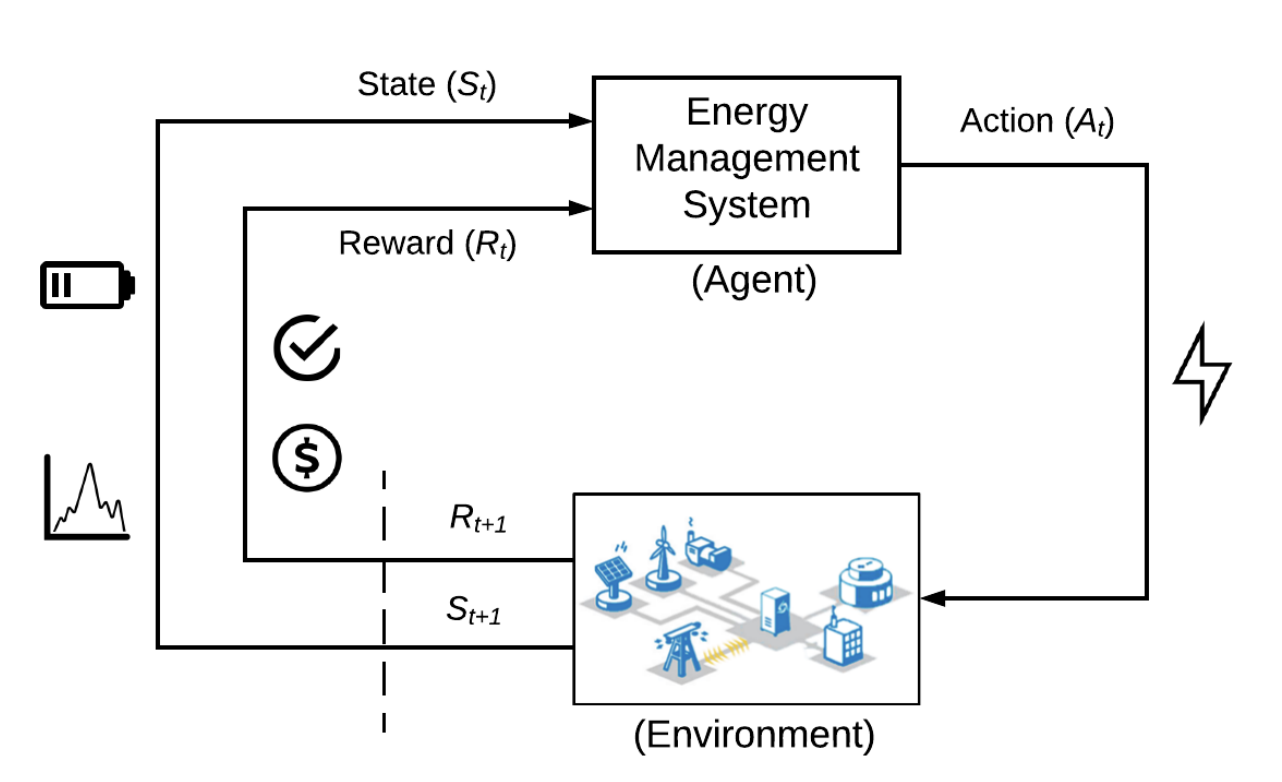
Cesar Garrido, Luis G. Marin, Guillermo Jiménez-Estévez, Fernando Lozano, Carolina Higuera, IEEE CHILECON, 2021 Application of Deep RL for an Energy Management System (EMS) and its comparison with respect to classical techniques such as Rule-Based and Model Predictive Control. |
|
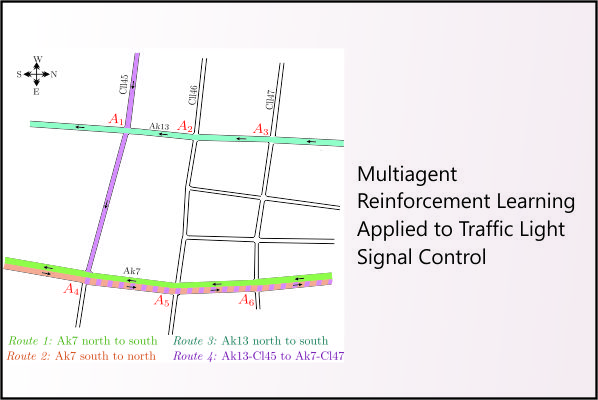
Carolina Higuera, Fernando Lozano, Edgar Camilo Camacho, Carlos Higuera PAAMS, 2019 Code / Video / PDF Application of MARL to traffic light signal control to reduce travel time. We simulated a network with six signalized intersections in SUMO, using real data from the Transit Department of Bogota, Colombia. This project was my Master thesis! |
|
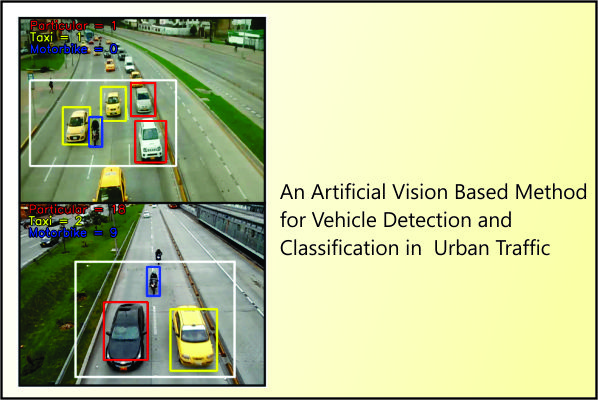
Edgar Camilo Camacho, Cesar Pedraza, Carolina Higuera, IbPRIA, 2019 A system to analyze urban traffic using computer vision to get realiable information of traffic flow in Bogota, Colombia. |
|
|
|
Carolina Higuera*, Siyuan Dong, Byron Boots, Mustafa Mukadam CoRL 2022. Learning, Perception, and Abstraction for Long-Horizon Planning Workshop webpage |
|
Carolina Higuera*, Joseph Ortiz, Haozhi Qi Luis Pineda Byron Boots, Mustafa Mukadam CoRL 2023. Neural Representation Learning for Robot Manipulation Workshop webpage |
|
|